Developed a fleet of miniature connected and automated vehicles to simulate cooperative driving automation in different traffic scenarios. The project designed and built the vehicles perception, decision making, control, and communication protocols from scratch, and the fleet was tested in various traffic scenarios.
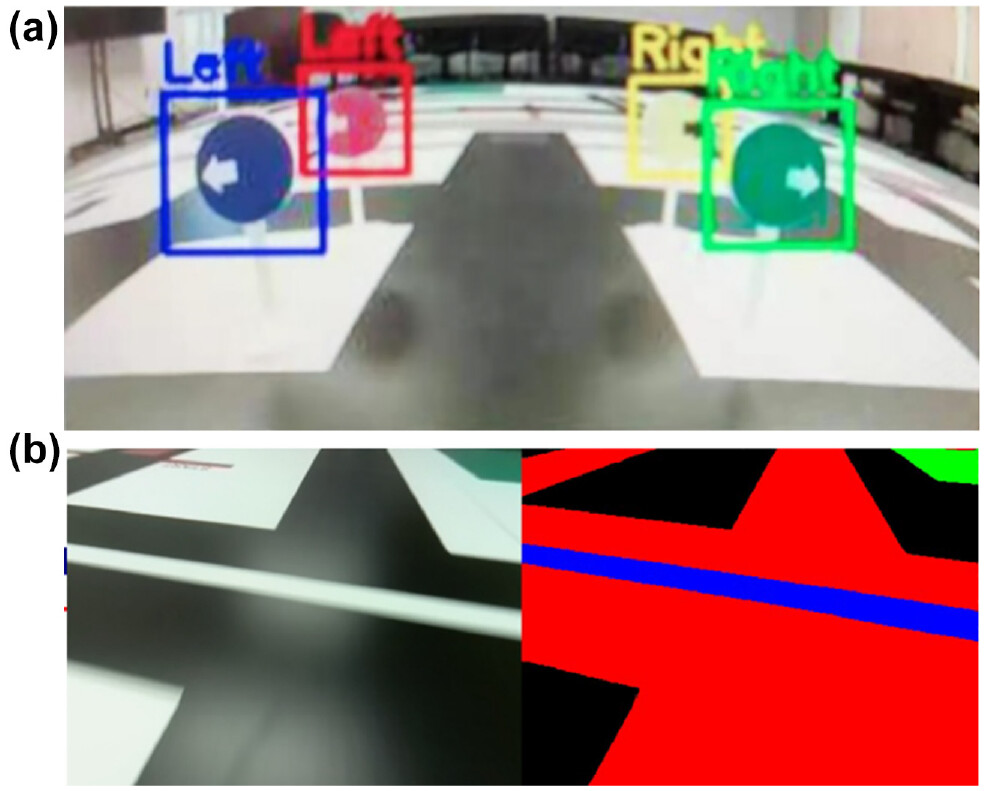
Traffic sign detection and environment perception
Successfully demonstrated cooperative driving automation in a miniature fleet of connected and automated vehicles in highway and urban driving scenarios.
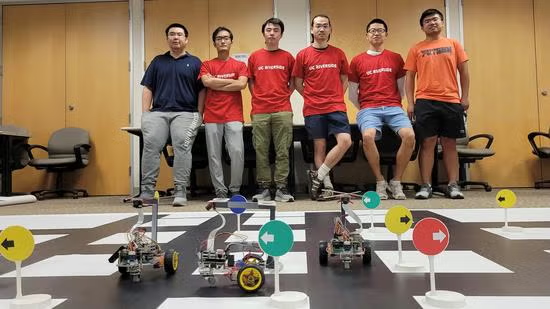
CE-CERT AUTOTRAC Team
![]() Robotics Competitions to Design Future Transport Systems: The Case of JRC AUTOTRAC 2020
Robotics Competitions to Design Future Transport Systems: The Case of JRC AUTOTRAC 2020