Comprehensive research program at MIT AgeLab developing context-aware driver behavior models using explainable AI methods. The core approach focuses on understanding triads of vehicle-driver-environment interactions in partial automation scenarios.
Employs naturalistic driving data from MIT-AVT dataset combined with advanced machine learning methods to understand context-dependent driver behavior in automated driving scenarios.
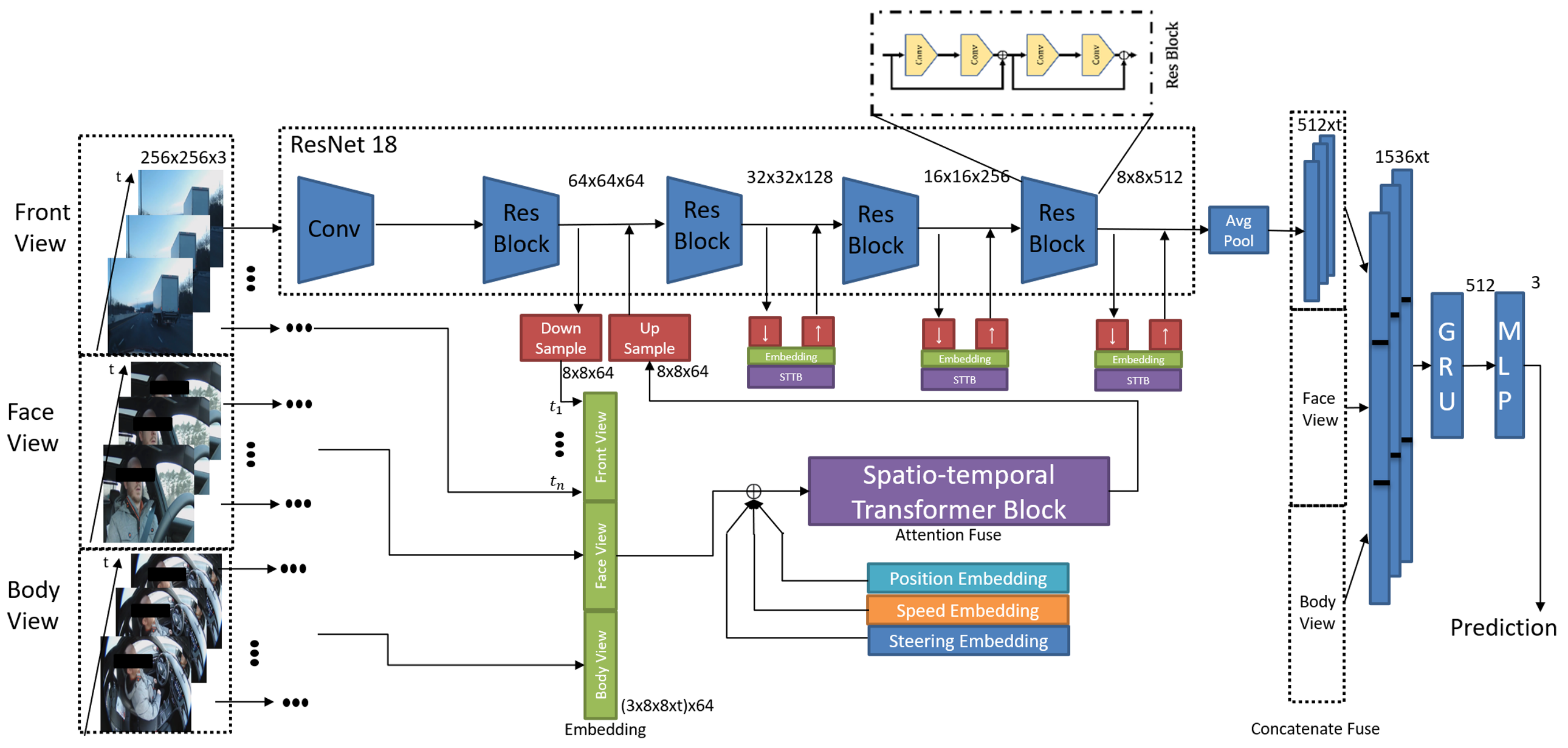
Flowchart for lane change prediction
Comprehensive insights into driver behavior patterns across multiple automation scenarios, with published and ongoing research demonstrating improved understanding of human-automation interaction.