Comprehensive research program developing personalized adaptive cruise control systems using inverse reinforcement learning and real-time adaptation. Part of Toyota's Digital Twin roadmap, evolving from offline IRL to online GPR-based real-time learning.
Multi-phase approach combining offline inverse reinforcement learning with online Gaussian process regression for real-time driver preference adaptation within a cloud-vehicle digital twin framework.
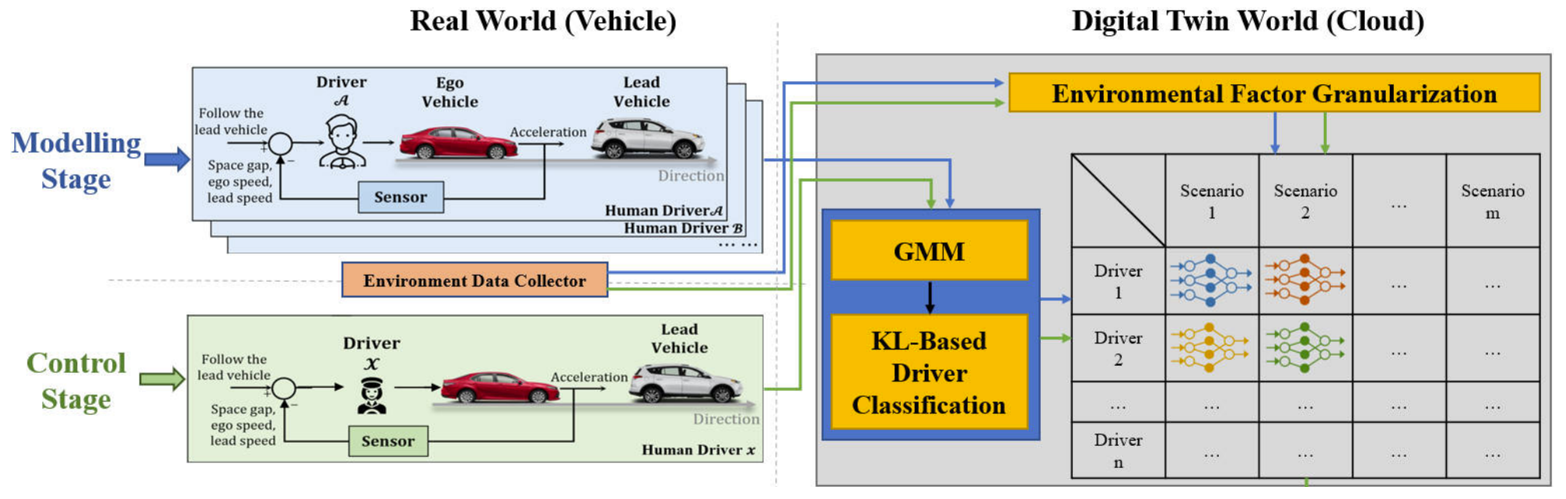
P-ACC Digital Twin framework
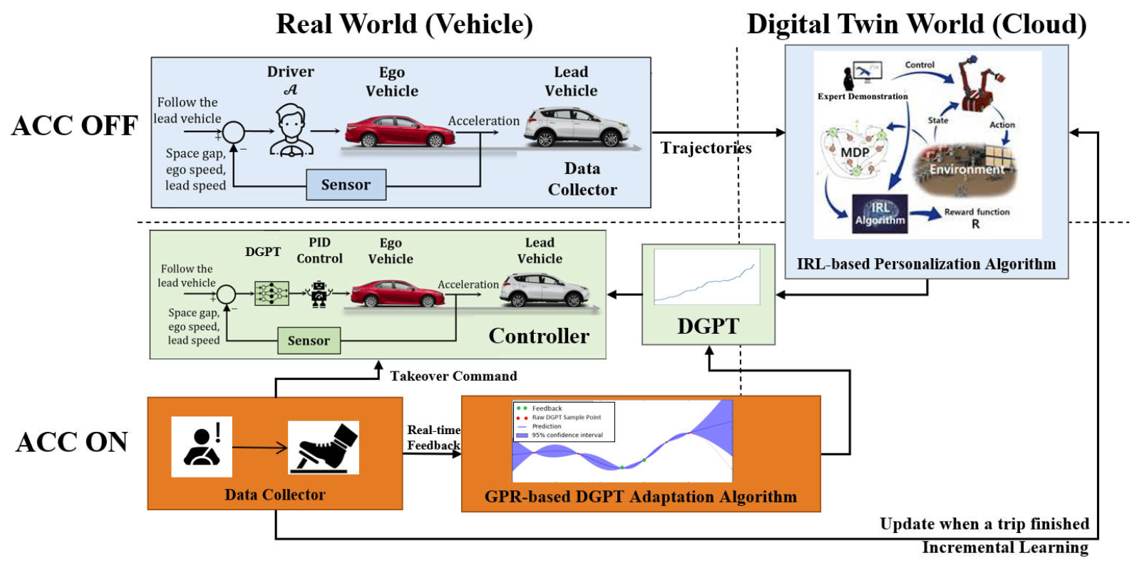
P-ACC IRL (offline) + GPR (online) learning
Demonstrated improvements in personalization accuracy and driver satisfaction across multiple validation studies using both naturalistic driving data and human-in-the-loop simulation.