Comprehensive roadside perception system integrating multi-sensor infrastructure for real-time traffic monitoring and V2I communication. Developed smart intersection technology with advanced computer vision algorithms for cooperative driving automation support.
Multi-sensor fusion approach combining LiDAR, camera, and GPS technologies with advanced machine learning algorithms for robust traffic perception and real-time V2I communication in smart intersection environments.
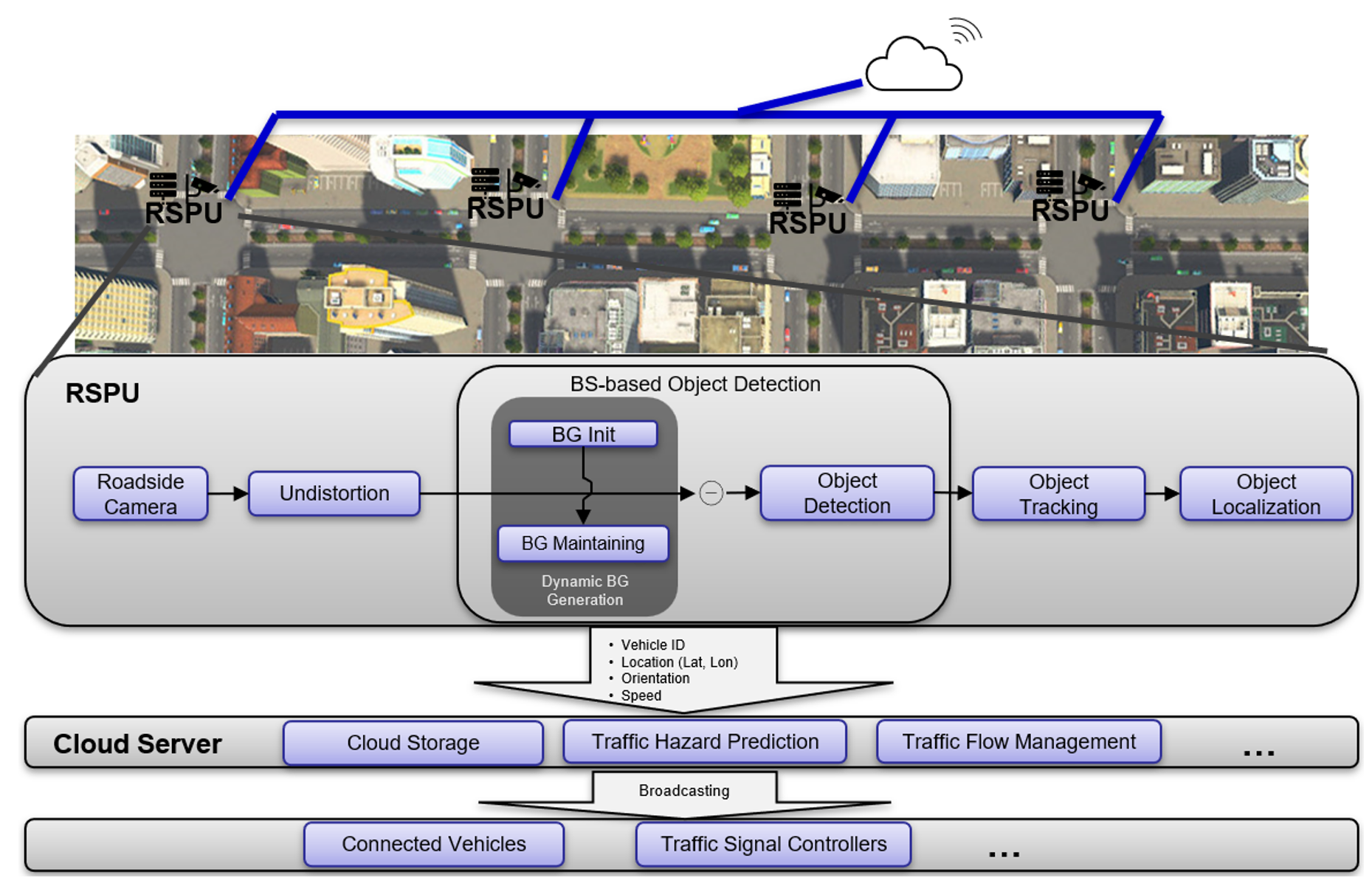
Roadside Perception Unit (RSPU) system architecture
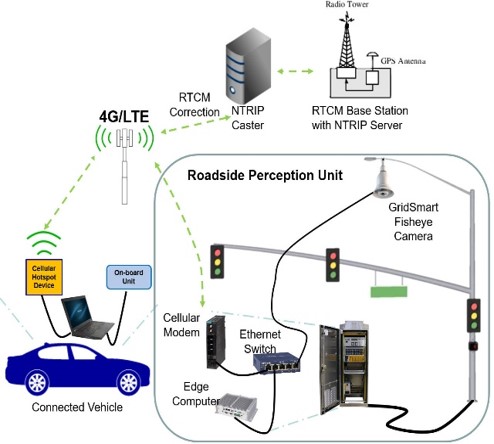
V2I communication network topology

Real-time traffic detection and monitoring results
Successfully deployed smart intersection system with proven real-time traffic monitoring capabilities and reliable V2I communication performance validated through both simulation and field testing.